
 搜索
搜索
-
 基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。 -
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
 集团成员
集团成员
 EN
EN新时达机器人IO信号配置
发布时间:
2024-12-13 15:29
今天,让我们一起来学习如何在新时达机器人操作软件中配置IO信号。IO信号在工业自动化行业中扮演着至关重要的角色,它们是设备与设备之间沟通的桥梁,是实现数据采集与逻辑判断的基础。
信号配置
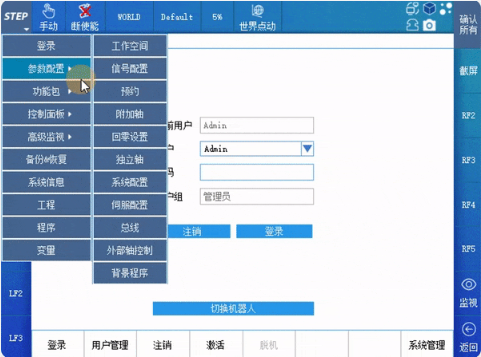
依次点击“STEP”>参数配置>信号配置,进入IO信号配置界面。如下图所示:
IO配置
IO配置包含DI、DO、AI、AO、GDI、GDO六个配置页面,其中DI用于配置数字量输入信号,DO用于配置数字量输出信号,AI用于配置模拟量输入信号,AO用于配置模拟量输出信号,GDI用于配置组数字输入信号,GDO用于配置组数字输出信号。
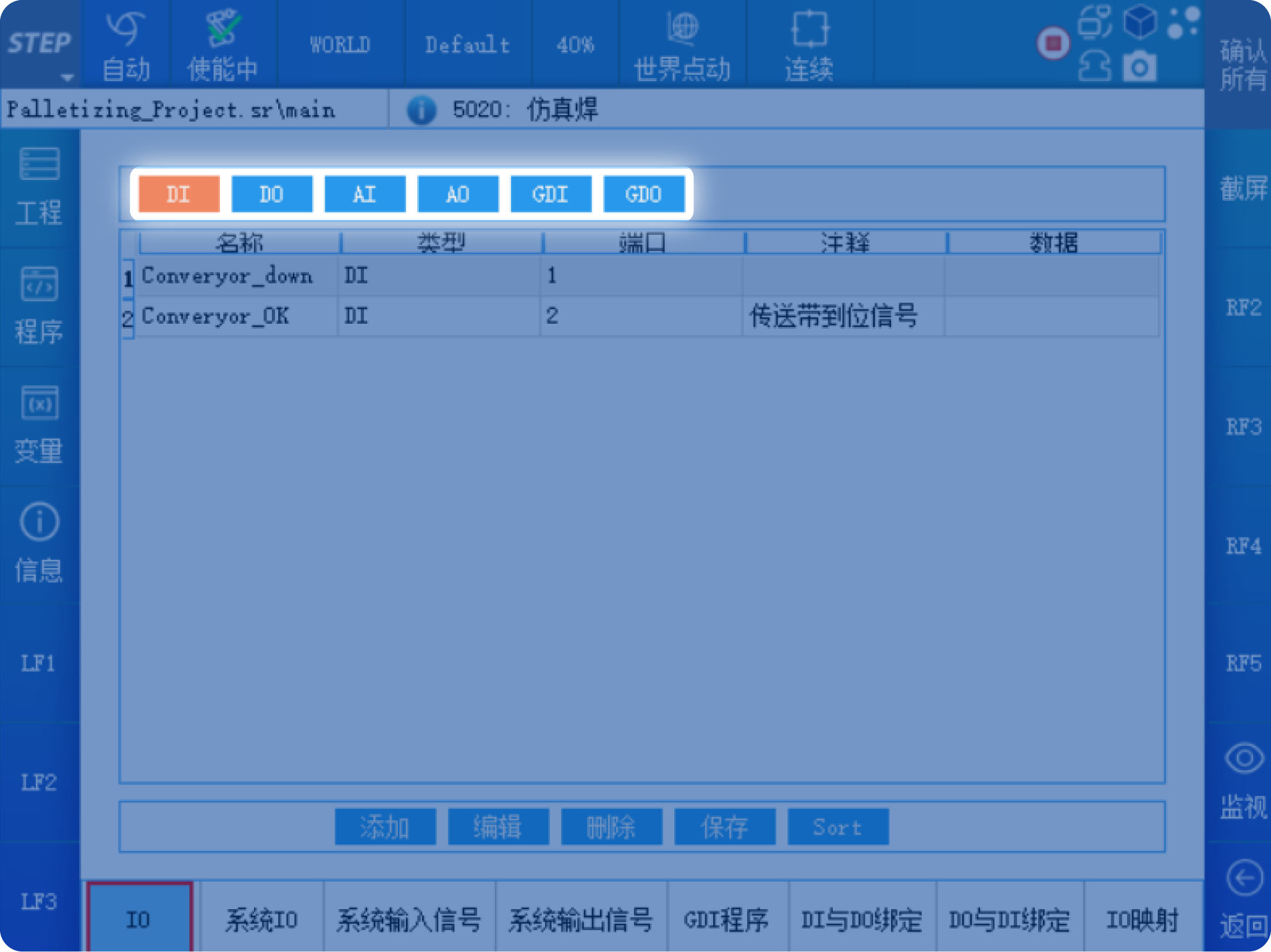
选择DI页面,进入数字量输入信号配置界面,DI信号最多能配2048个,端口为1-2048。在DI配置界面,第一列显示了DI信号的名称,第二列显示了IO信号的类型,第三列显示了DI的端口号,第四列显示DI信号的注释。若名称或者注释过长显示不全,可以拖动显示框,使名称完整显示。

点击DI配置界面的添加按钮,会弹出添加DI 信号的编辑框,如下图所示:
 在名称栏里输入添加的DI信号的名称,信号名称不可以是中文,端口号里输入DI端口号,端口号不能为已经使用的端口号,即不能与别的DI信号的端口号重复,注释中可以输入中文解释该信号的含义。
在名称栏里输入添加的DI信号的名称,信号名称不可以是中文,端口号里输入DI端口号,端口号不能为已经使用的端口号,即不能与别的DI信号的端口号重复,注释中可以输入中文解释该信号的含义。
在DI信号编辑界面,可以修改DI信号的名称、端口号和注释。若不需要某个DI信号,可以选中该信号后,点击“删除”,弹出删除确认框,点击“是”按钮就可删除。
修改DI页面的配置后,要点击保存才能有效,否则DI配置无效。
点击DO,进入数字量输出信号配置界面,DO信号最多能配2048个,端口号为1-2048。
点击DO配置界面的添加按钮,会弹出添加DO信号的编辑框,如下图所示:
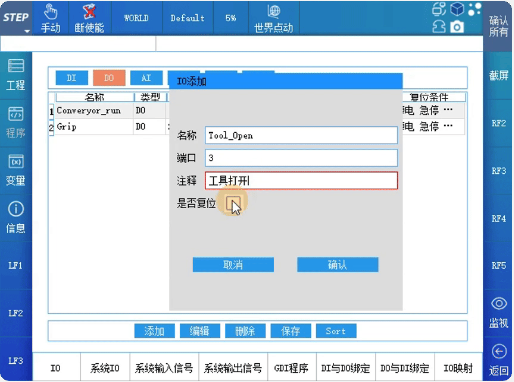 在名称栏里输入添加的DO信号的名称,信号名称不可以是中文,端口号里输入DO端口号,端口号不能为已经使用的端口号,注释中可以输入中文解释该信号的含义。
在名称栏里输入添加的DO信号的名称,信号名称不可以是中文,端口号里输入DO端口号,端口号不能为已经使用的端口号,注释中可以输入中文解释该信号的含义。
在DO信号配置的中有“是否复位选项”,点击该方框则显示DO信号复位配置界面,当出现满足复位条件的情况时,该DO信号会自动跳转到复位数据中选择的信号状态。
修改DO页面的配置后,要点击保存才能有效,否则DO配置无效。
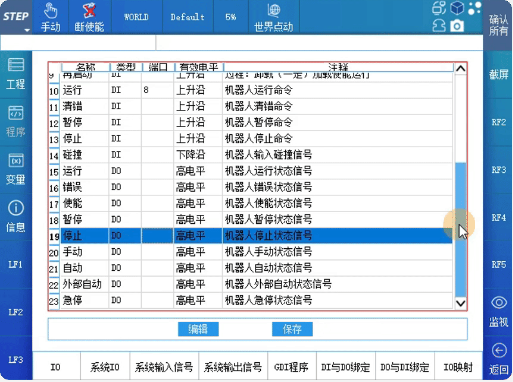
系统IO
选择“系统IO”选项进入系统信号配置界面。通过对系统IO的配置可以实现外部信号控制机器人运行状态及机器人对外输出自身状态。
默认程序需要配置工程与程序,程序1至程序4需要配置端口号、工程和程序,其他信号仅需要配置端口号。
当默认程序配置完成且程序1至程序4无输入信号时,外部输入“加载”信号会自动加载默认程序中配置的程序;当程序1至程序4的端口有信号时,外部输入“加载”信号则自动加载程序1-4中配置的程序。
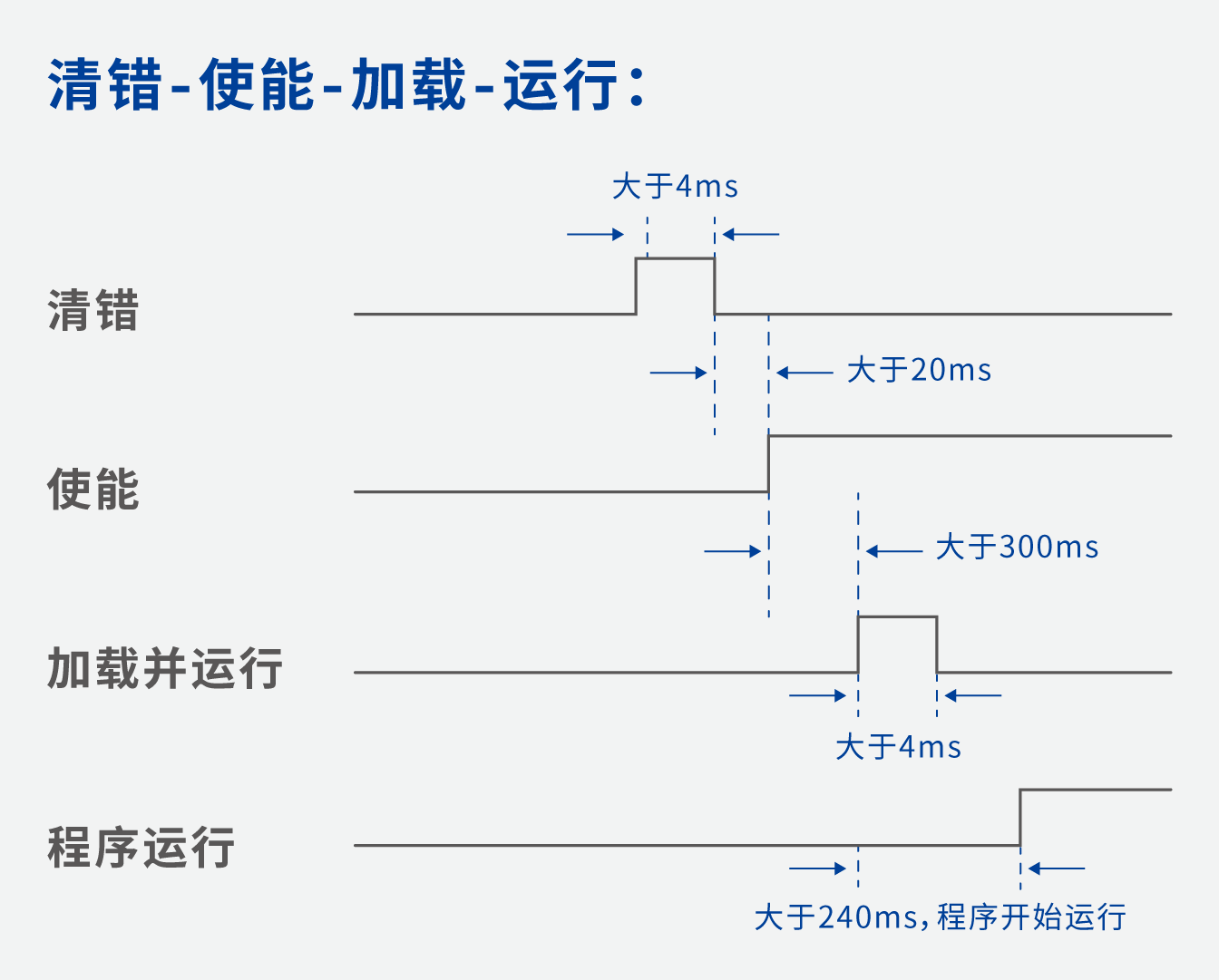
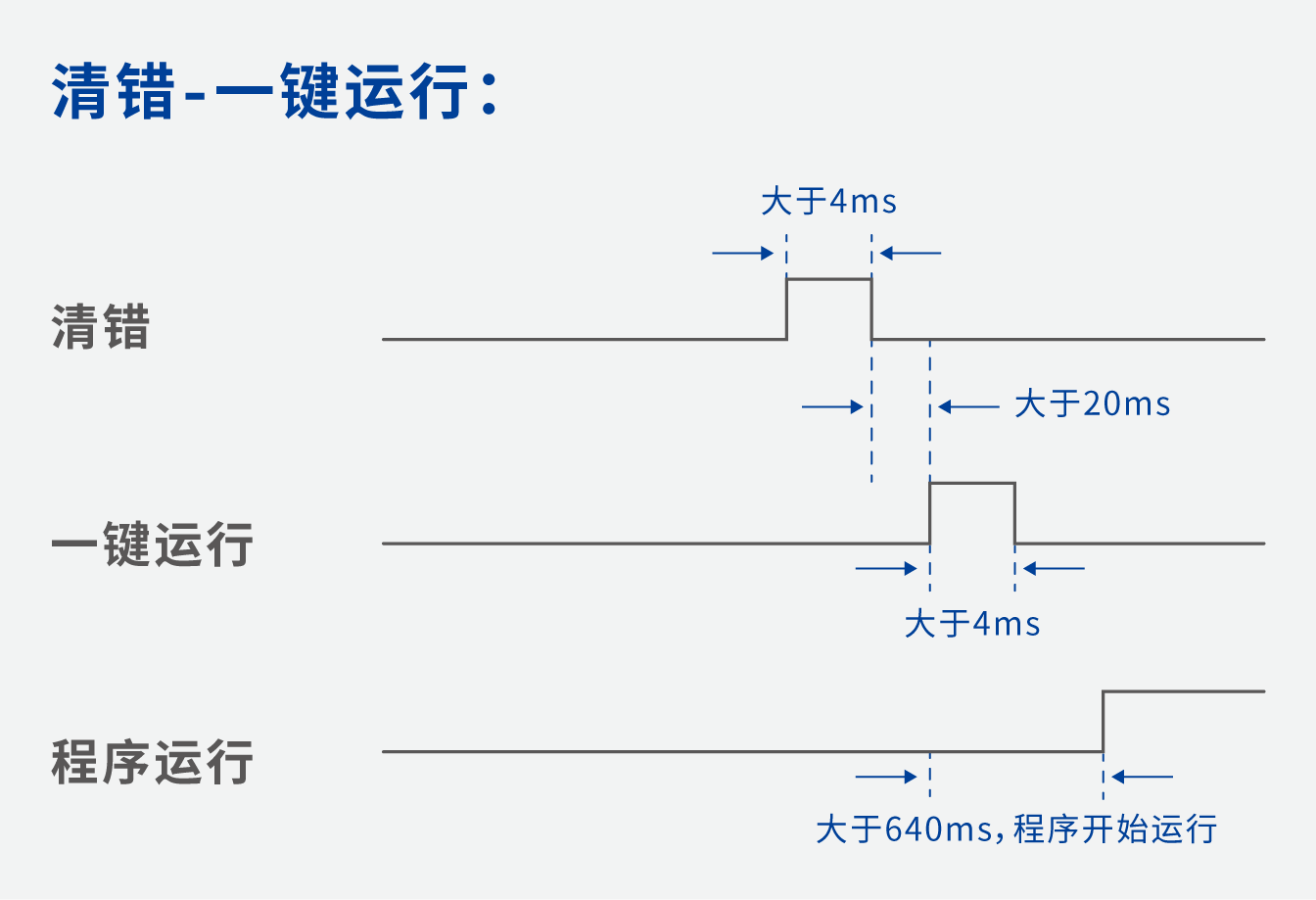
机器人启动时序可分为两类,即使用“分布运行”启动程序和“一键运行”启动程序。
系统信号里的暂停和运行信号,在外部自动和自动模式下都生效。外部自动模式下启动程序时,会判断系统信号里的暂停信号和停止信号,若暂停信号或停止信号是高电平,则无法启动;自动模式下启动程序时,会判断系统信号里的暂停信号,若暂停信号是高电平,则无法启动。
机器人运行或加载程序时无法保存程序,若没有点击“保存”按钮,就直接切换到其他页面,则之前的配置会全部丢失,需要重新配置。
IO绑定
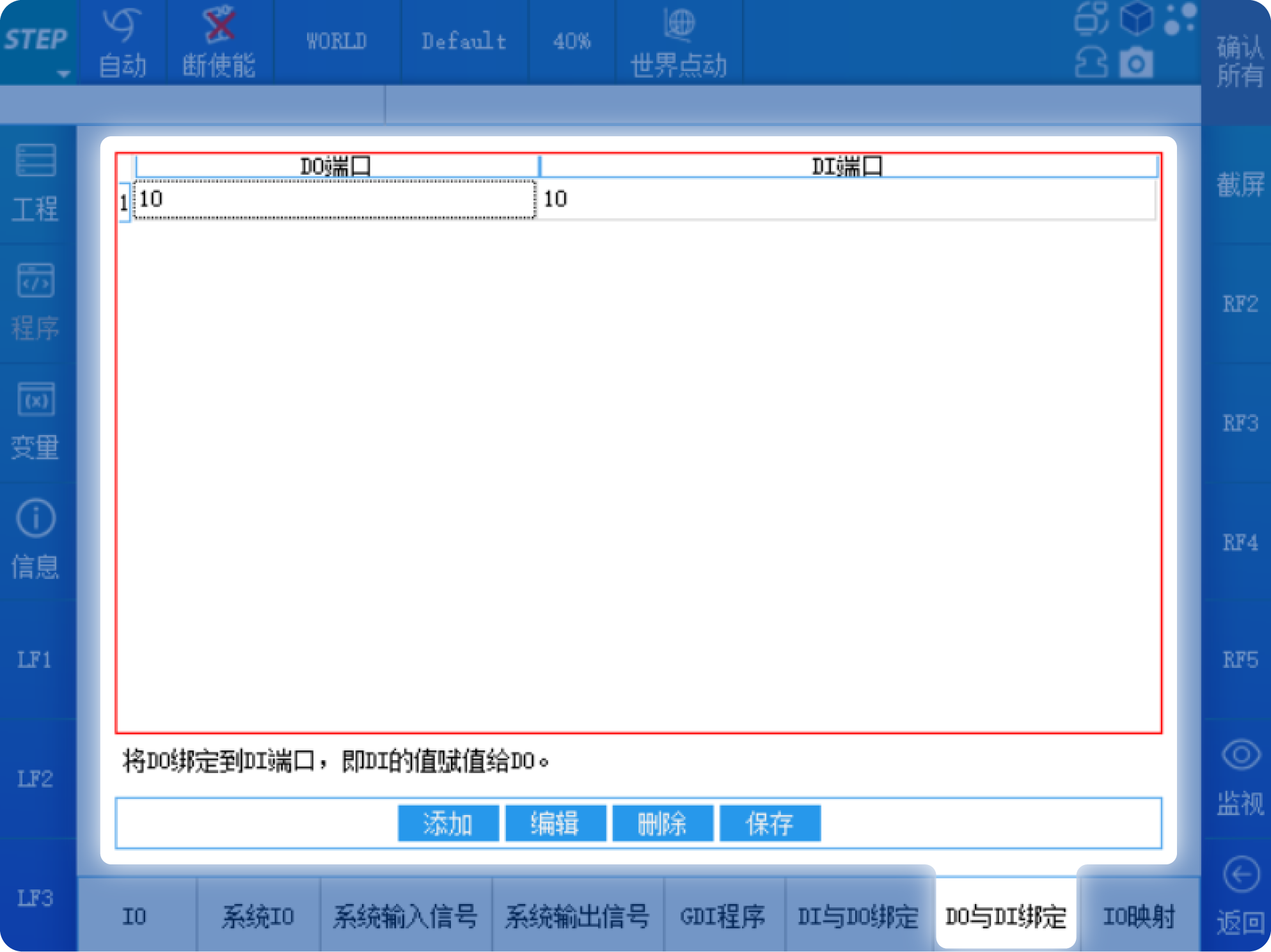
使用“DI与DO绑定”和“DO与DI绑定”可以无需编写程序直接将DI赋值给DO或将DO赋值给DI。
如:在“DO与DI绑定”中设置DI端口为10,DO端口为10,当DI10输入TRUE信号时,DO10也会输出TRUE信号。
IO映射
选择“IO映射”选项进入IO逻辑关系配置的界面。

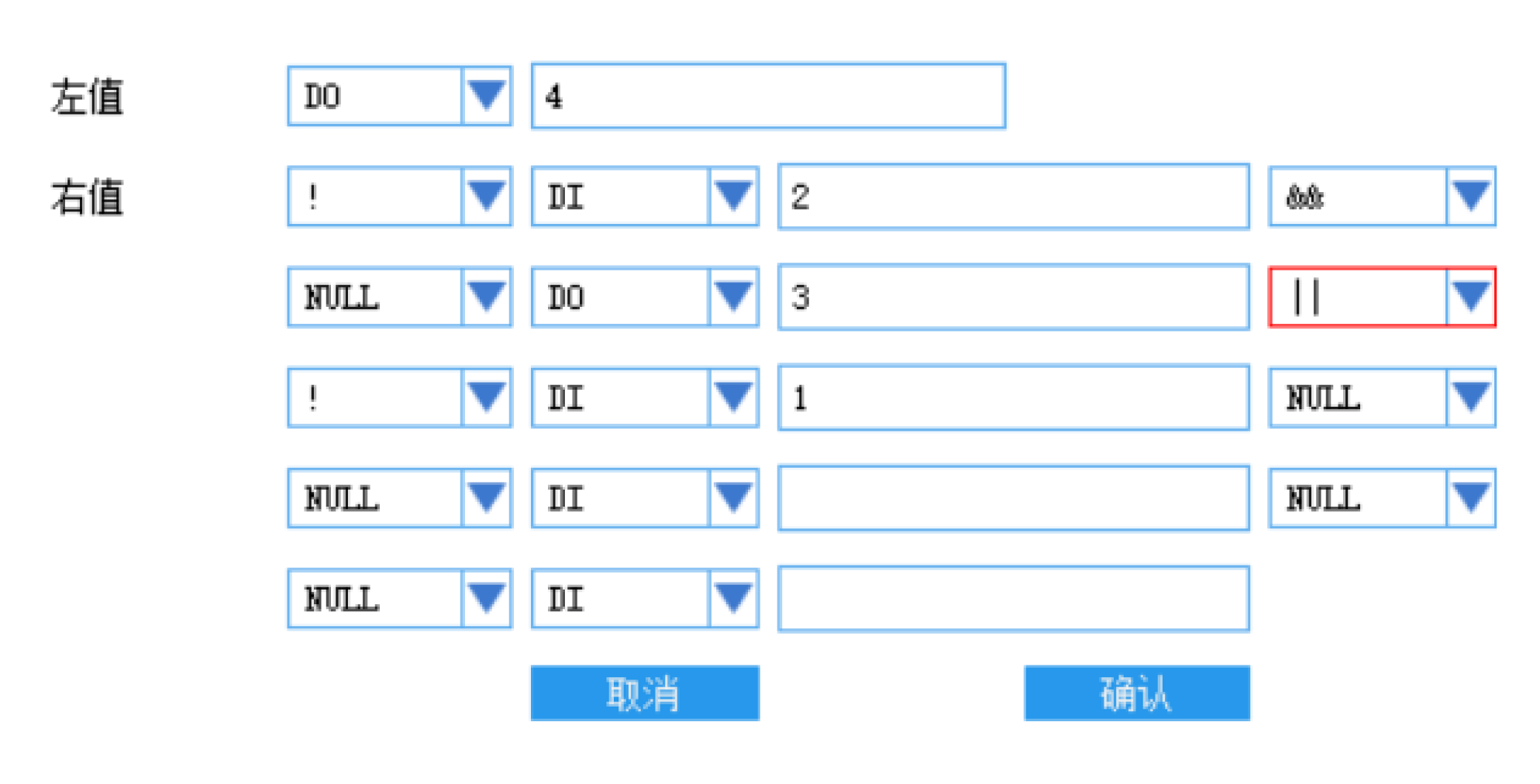
可以对DI和DO进行与或非的逻辑运算,比如点击页面底部的添加按钮,弹出如下弹框
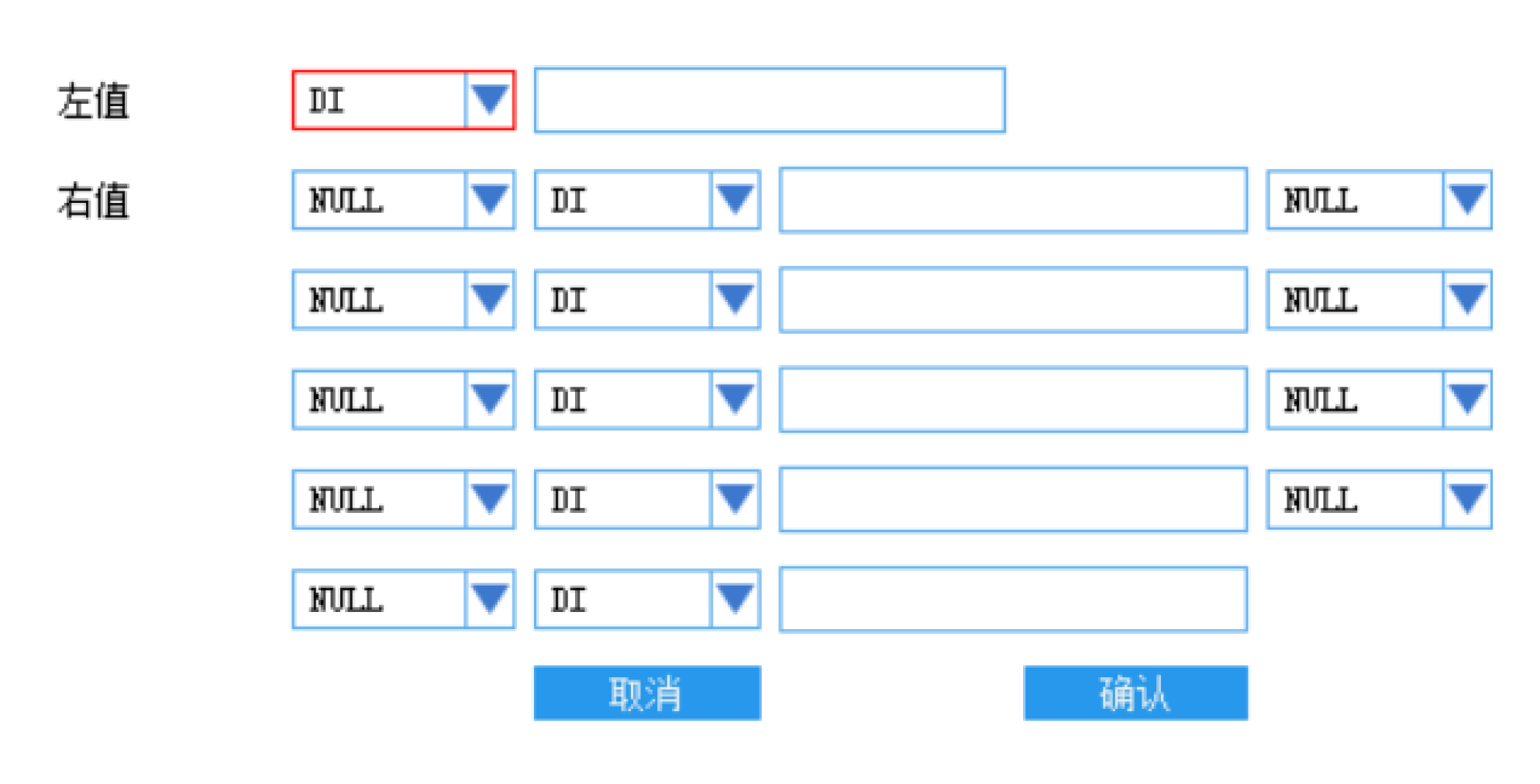 左值可以选择DI或DO,然后输入端口号,右值同样可以选择DI或DO,并且可以用与或逻辑符号将5个DI或DO的值关联在一起,并且可以对其中的每个DI或DO进行取反,最后生成一个表达式赋值给左值,如下图所示:
左值可以选择DI或DO,然后输入端口号,右值同样可以选择DI或DO,并且可以用与或逻辑符号将5个DI或DO的值关联在一起,并且可以对其中的每个DI或DO进行取反,最后生成一个表达式赋值给左值,如下图所示:
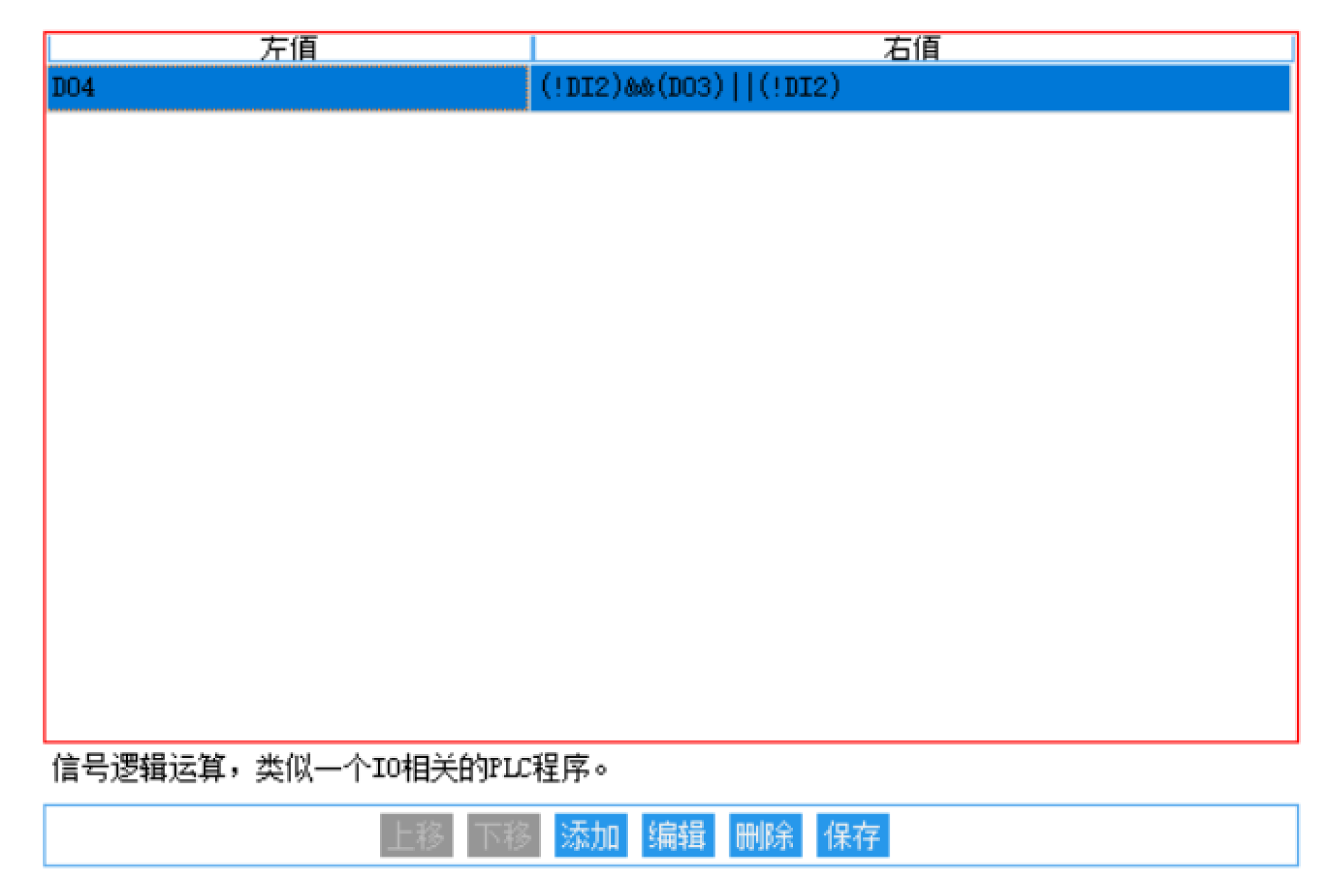 表格里第一行的运算表示将DI2取反再和DO3取与,再和DI1取反的值取或,然后把值赋给DO4。
表格里第一行的运算表示将DI2取反再和DO3取与,再和DI1取反的值取或,然后把值赋给DO4。
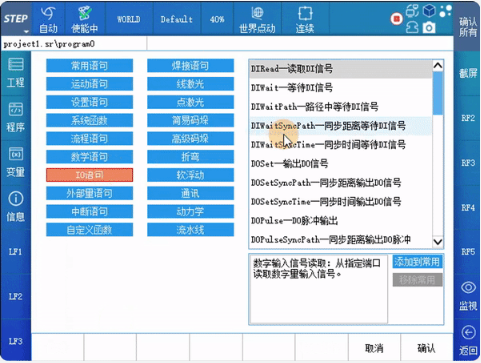
IO语句
新时达机器人控制系统内有丰富的IO信号指令。在程序中,选择新建,点击IO语句可以找到它们,选择需要的IO信号语句,点击确认可以进入该语句的配置界面,配置完成后点击确认将语句添加到程序中。
6.1:常用的等待DI信号输入用法
▉ DIWait(Converyor_OK,TRUE)
当数字量输入信号Converyor_OK为TRUE时可继续运行下一行,否则程序会一直在该行等待。
▉ bool0:=DIWait(Converyor_OK,TRUE,int0)
当数字量输入信号Converyor_OK在规定时间int0内置为TRUE则程序跳转下一行且bool0被置为TRUE;当Converyor_OK在规定时间int0内没有被置为TRUE则程序也会跳转下一行但bool0被置为FALSE。
6.2:常用的DO信号输出用法
▉ DOPulse(Converyor_run,TRUE,Ms2000)
将DO信号Converyor_run输出为TRUE持续时间2000ms。DOSet语句用于给外部DO端口设置为指定值。如DOSet(Converyor_run,TRUE);将信号Converyor_run所在端口的值置为TRUE。更多IO信号语句使用方法详见STEP机器人用户编程手册。
新时达机器人IO信号配置
联系我们

智慧电梯:400-820-7921
变频驱动:400-821-0325
运动控制:400-821-0325
多关节机器人:400-920-0275
SCARA机器人:400-168-2718
邮箱:[email protected]
地址:上海市嘉定区思义路1560号,201802
扫一扫关注新时达
新时达公众号