
 搜索
搜索
-
 基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。 -
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
 集团成员
集团成员
 EN
EN新时达示教器开机主界面介绍
发布时间:
2024-12-03 11:52
本文主要介绍新时达机器人示教器主界面的功能和操作,方便您快速了解示教器的开机操作、常用按钮、特色语言功能和快捷键功能。
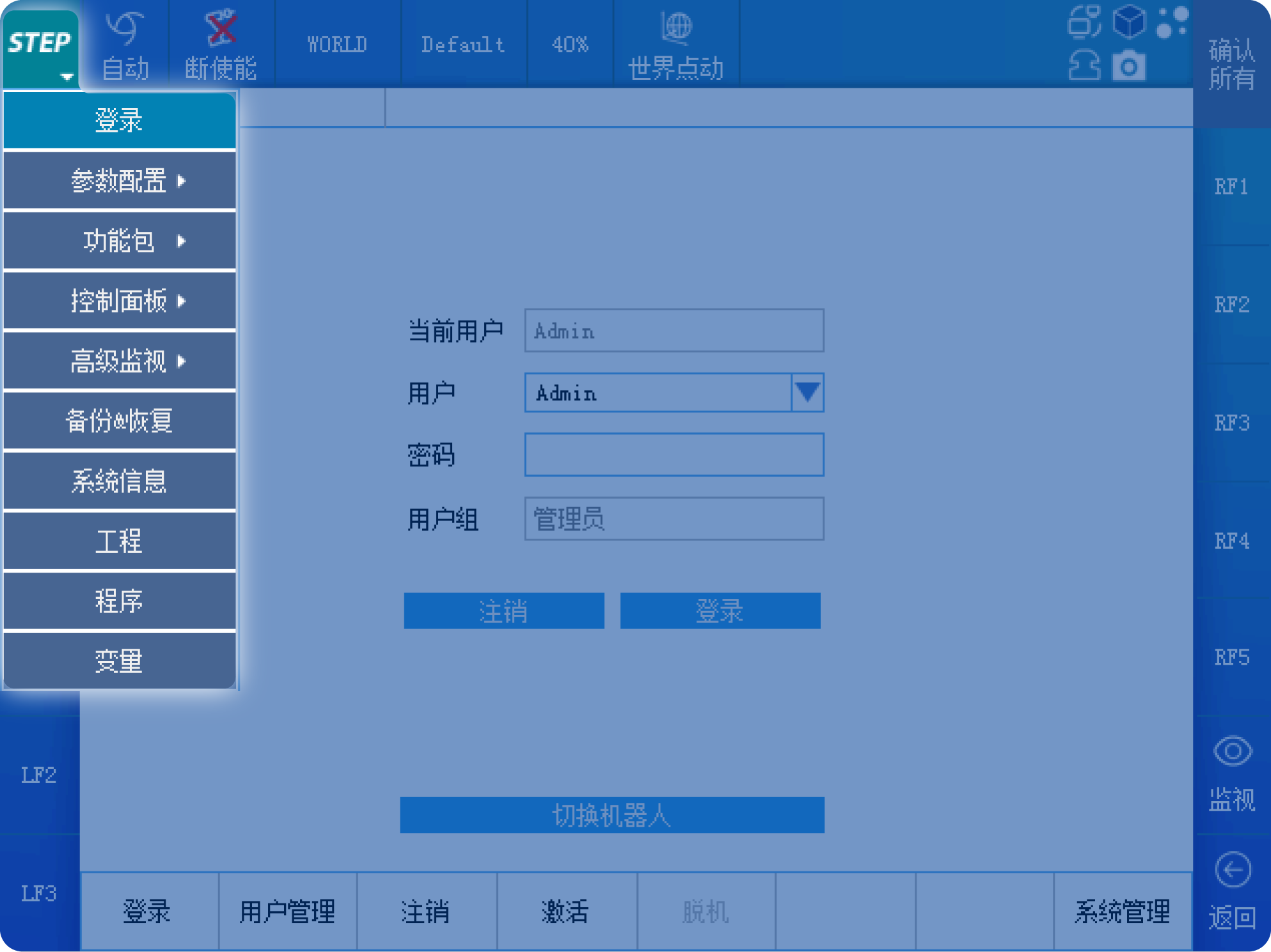
01|开机登录
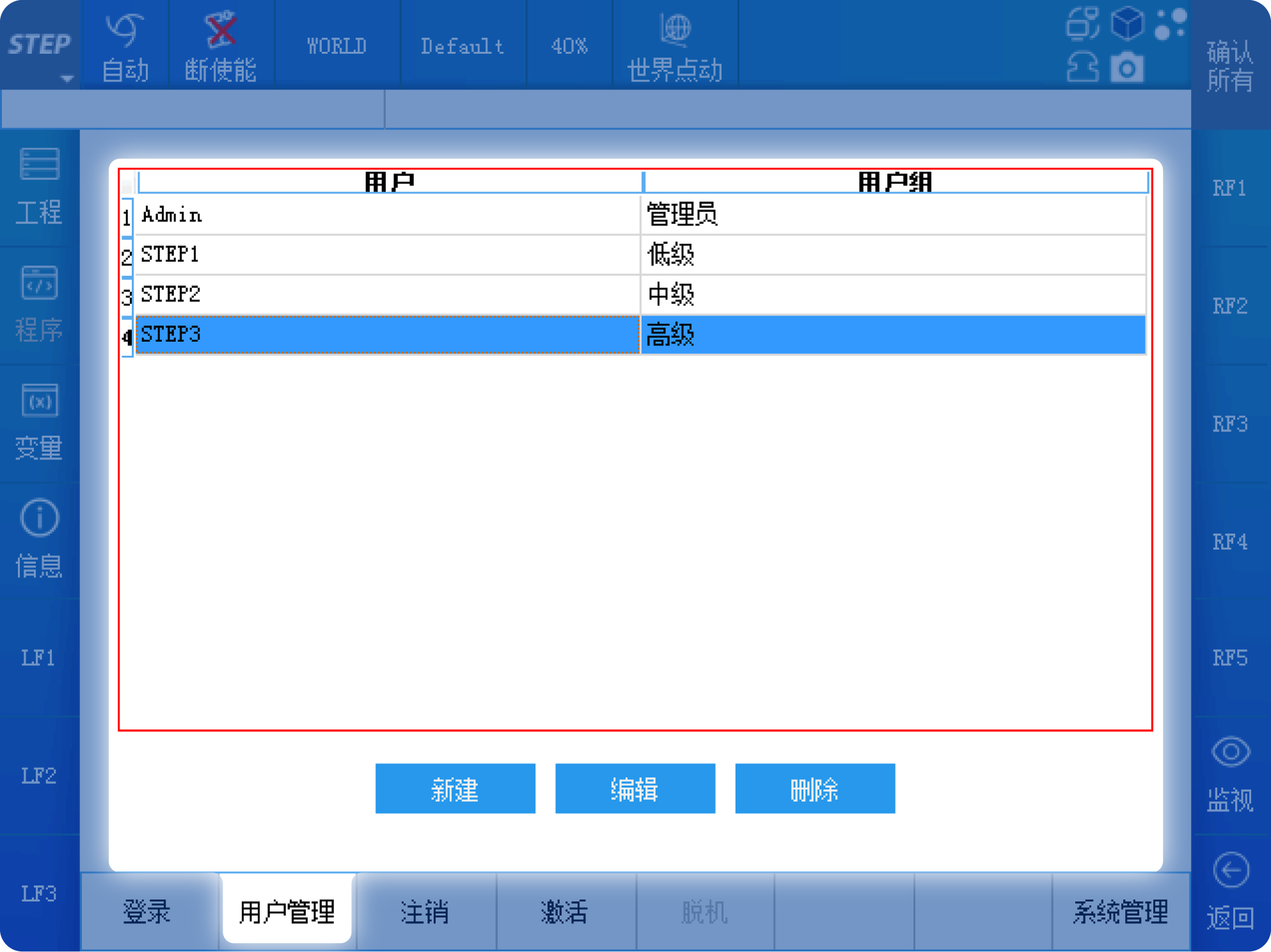
开机界面如下图,新时达机器人示教器默认登录密码123,登录前触摸屏上大部分按钮名称为灰色不可操作状态。登录后,大部分按钮名称变为白色可操作状态。
用户管理可以设置不同等级的用户,不同等级的用户操作权限不同,可以防止随意修改程序或者不小心修改了程序。
注销能设置自动注销的时间,当设定时间内不操作示教器,则当前登录的用户会自动注销。

激活界面默认为永久激活,也可以给系统加锁,设定使用期限,到期后机器人系统锁定,无法操作,需要解锁方可继续使用。
02|状态栏介绍
2.1:状态栏左侧菜单介绍
最上面一排是状态栏,最左侧的STEP按钮是菜单键,里面包含了示教器上所有的功能菜单,其余按钮为机器人当前状态的显示,也可以通过按钮切换相应的状态。
点击菜单后会弹出一级子菜单,包含登录、参数配置、功能包、 控制面板、备份&恢复、系统信息、工程、程序、变量,其子菜单里带“>”标志的表示还有二级子菜单。
状态栏各按钮描述如下。
▌运行方式
有手动、自动、外部自动三种模式,手动模式下可以通过示教器右侧的物理按钮控制各轴转动,或控制末端直线运动和姿态变化;自动模式下可以运行用户编好的程序;外部自动模式下可以通过外部信号控制机器人运行程序,如外部控制盒或PLC等。
▌使能状态
用于表示伺服是否上电(使能),通过按钮可以控制伺服上电和断电。

▌参考坐标系
用于显示当前机器人系统内部的坐标系。可以通过按钮设置坐标系,也可以在程序中设置。
▌工具
用于显示当前机器人系统内部的工具。可以通过按钮设置工具,也可以在程序中设置工具。
▌速度
用于显示当前机器人的运行速度。能通过按钮设置,也能在程序中设置速度。
▌手动坐标系
当“运行方式”为“手动”时,机器人运动所参考的坐标系。常用的有关节坐标系和世界坐标系两种,当设置关节坐标系时,可以控制机器人1到6轴单独转动,当设置为世界坐标系时,可以控制机器人末端直线运动或姿态变化。
2.2:状态栏右侧图标介绍
状态栏最右侧还有5个图标,各含义如下。

▌通讯状态
显示示教器与机器人控制器的通讯状态。
▌工作空间状态
工作空间有4种状态,分别为未激活安全工作空间功能、未触发安全工作空间、触发安全工作空间、禁用安全工作空间功能。

▌碰撞检测状态

▌安全回路状态
当急停按钮拍下或门禁开关打开时,会显示“安全回路断开”。

▌激光连接状态
激光连接状态图标为“激光工作中”时,表示正在接收激光扫描数据。

2.3:状态栏下方显示栏介绍
状态栏下方一栏,从左至右依次为当前加载的程序、当前报警信息和清除报警按钮。
03|工程及变量管理
点击左侧上方第一个按钮“工程”,显示系统当前的工程目录,一个工程下可以建立多个程序。

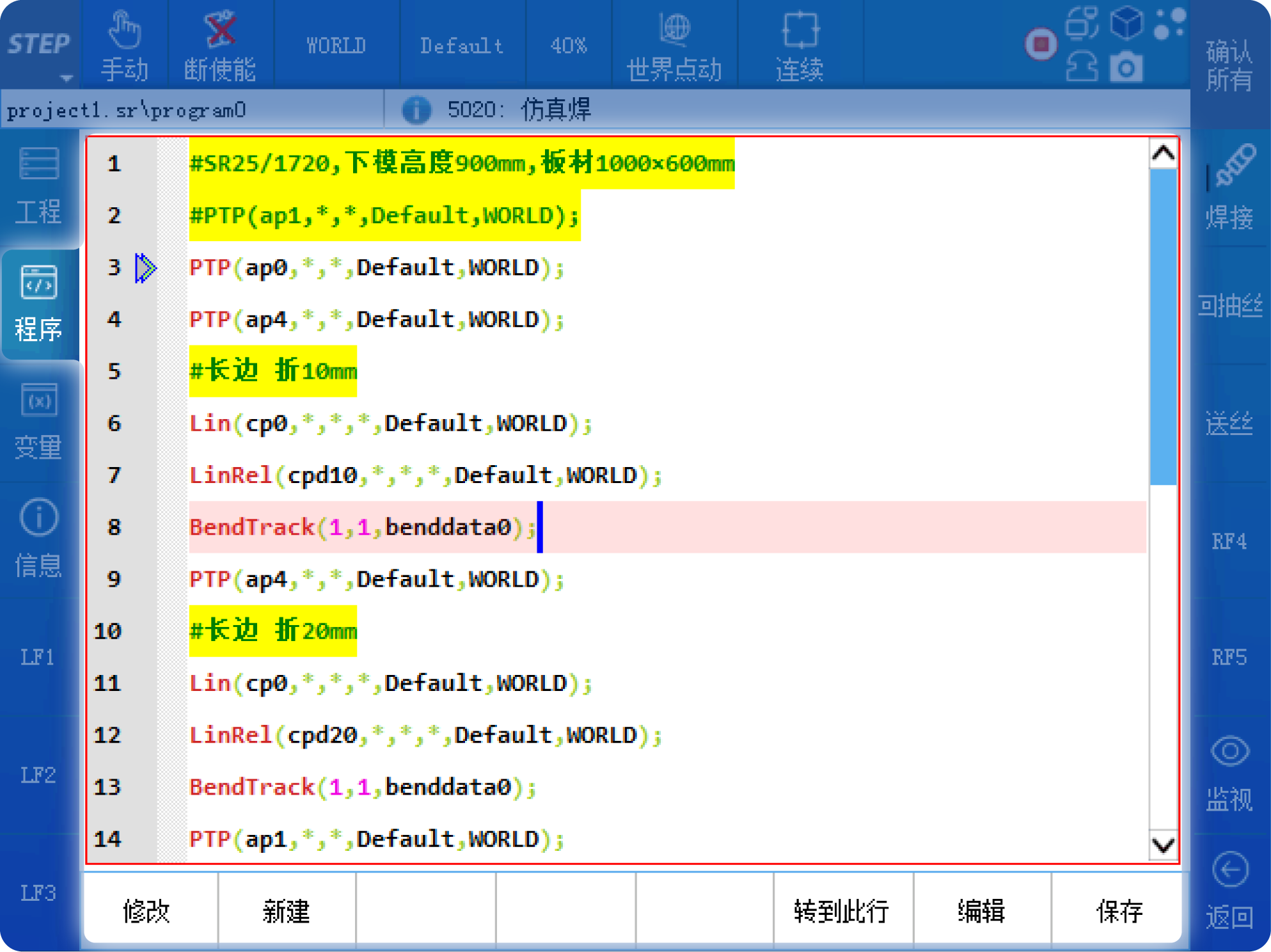
点击“程序”按钮,会显示当前加载的程序。
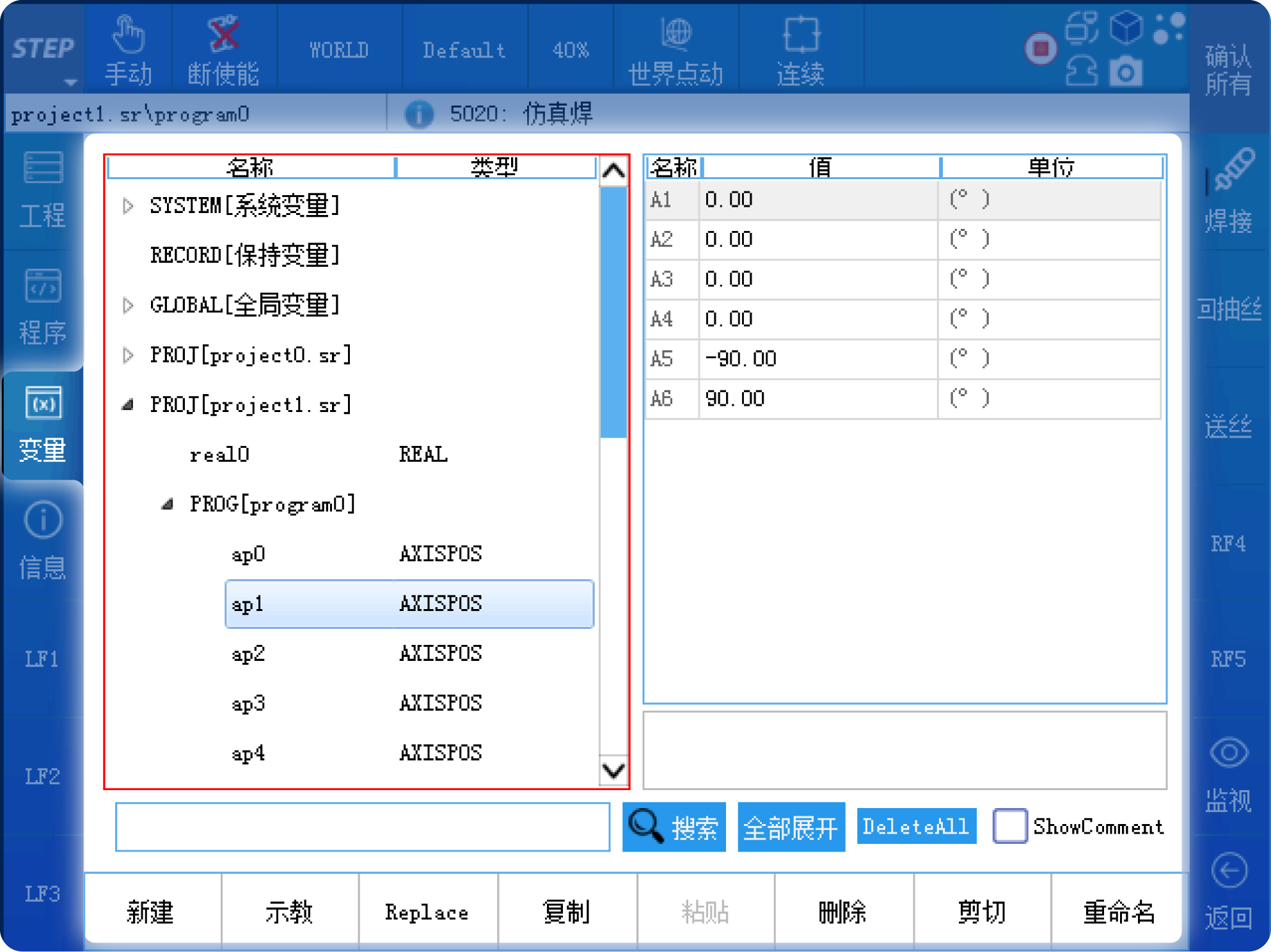
点击“变量”按钮显示系统所有的变量,支持变量搜索与编辑。
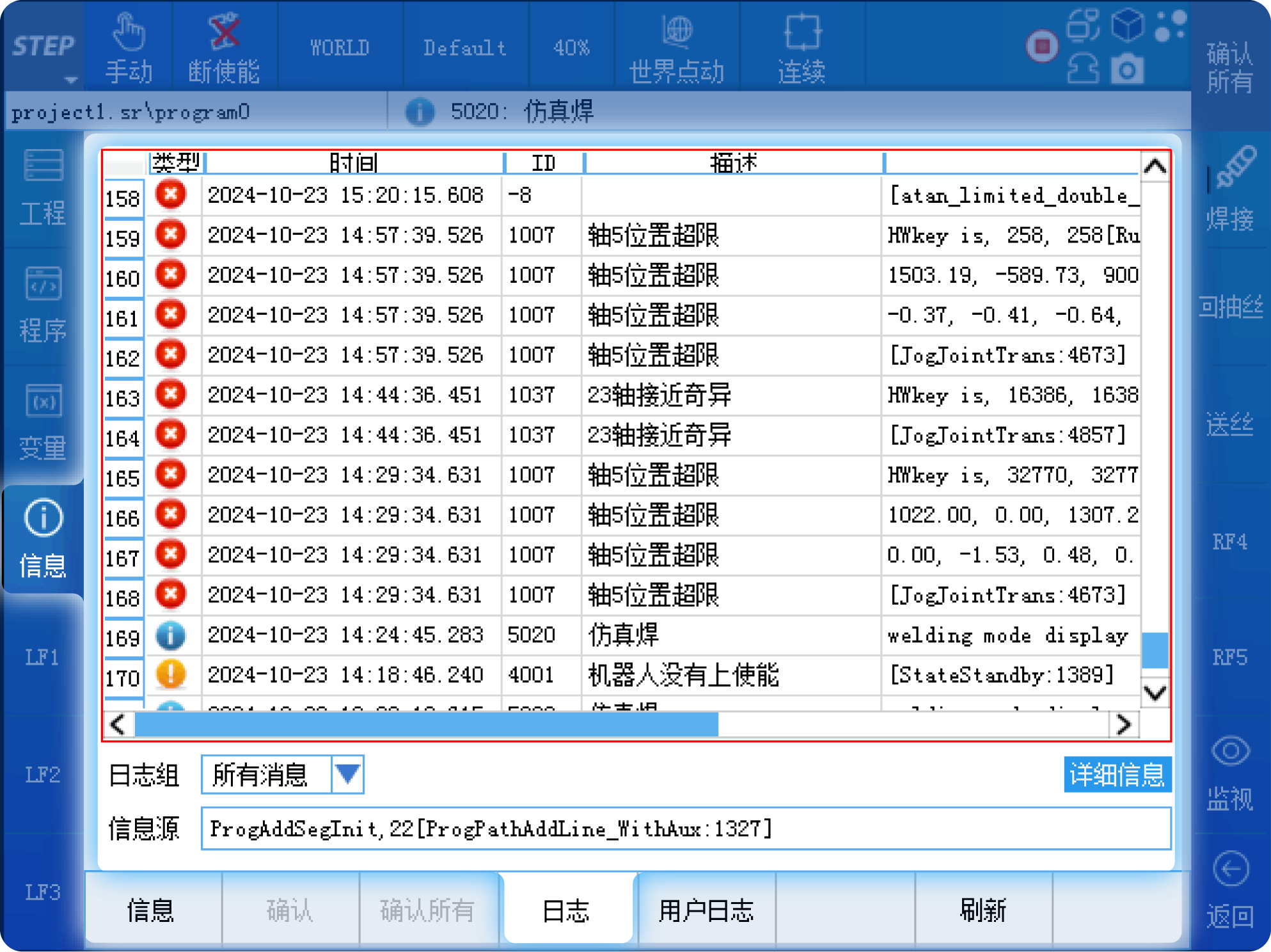
04|日志
点击左侧“信息”按钮,调出系统日志界面,首页显示的是当前的报错信息,点击“确认”按钮可以清空当前错误信息。点击“日志”按钮可以显示系统历史故障信息。
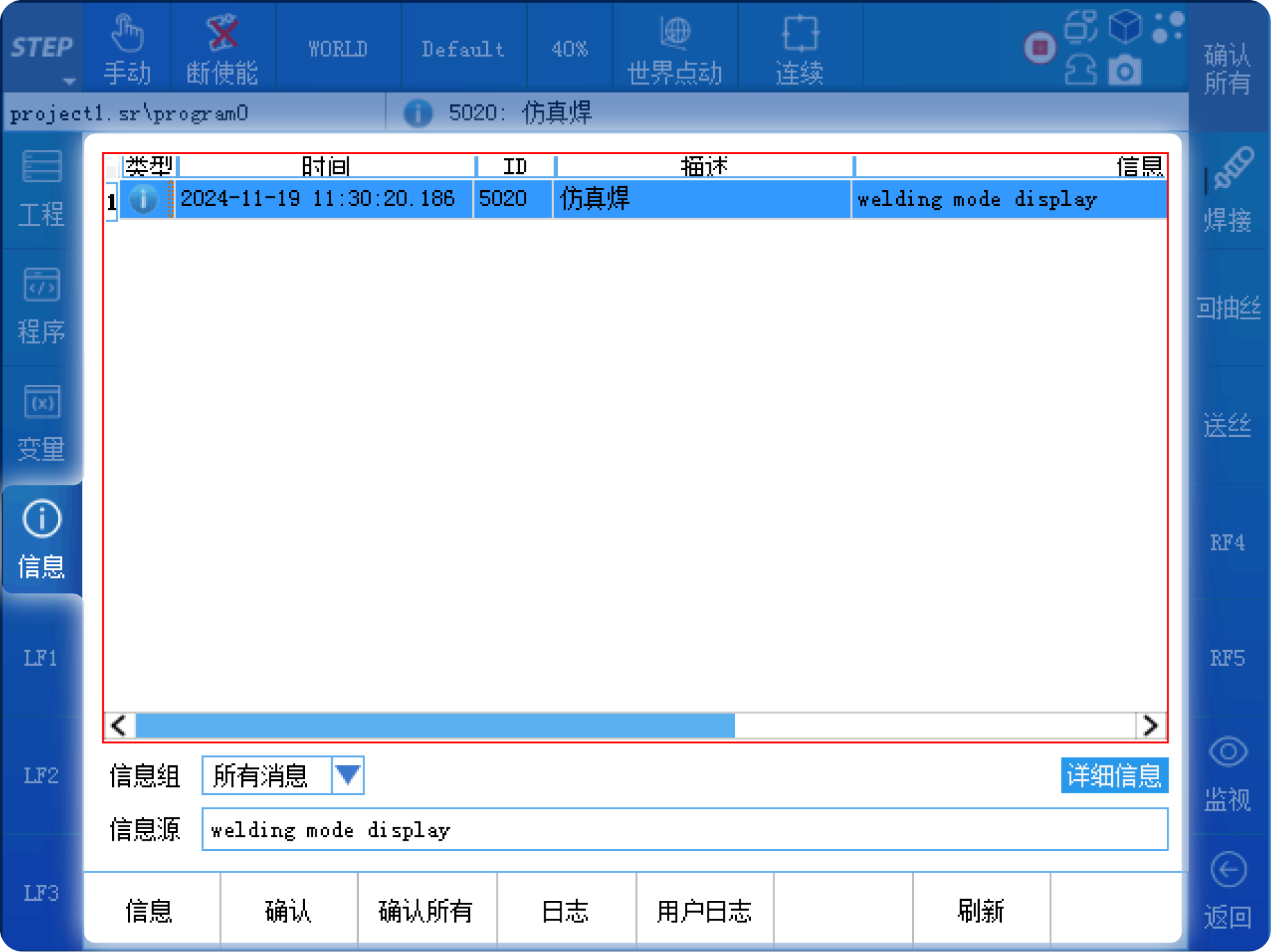
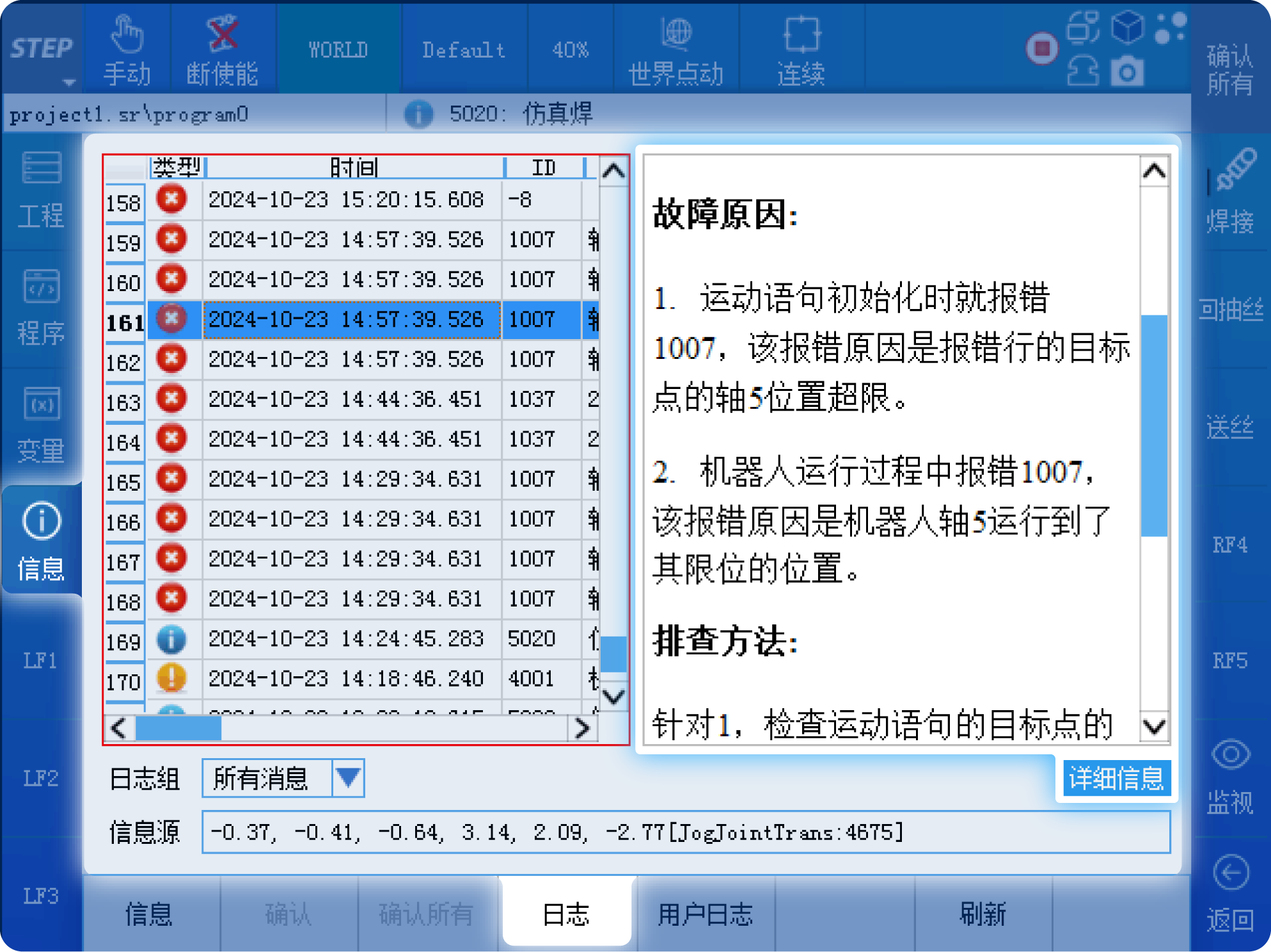
通过“详细信息”按钮,还可以看到故障原因及相应的处理方法。
05|监视
点击右侧下方的“监视”按钮,可以查看机器人末端的位置和IO信号等信息。
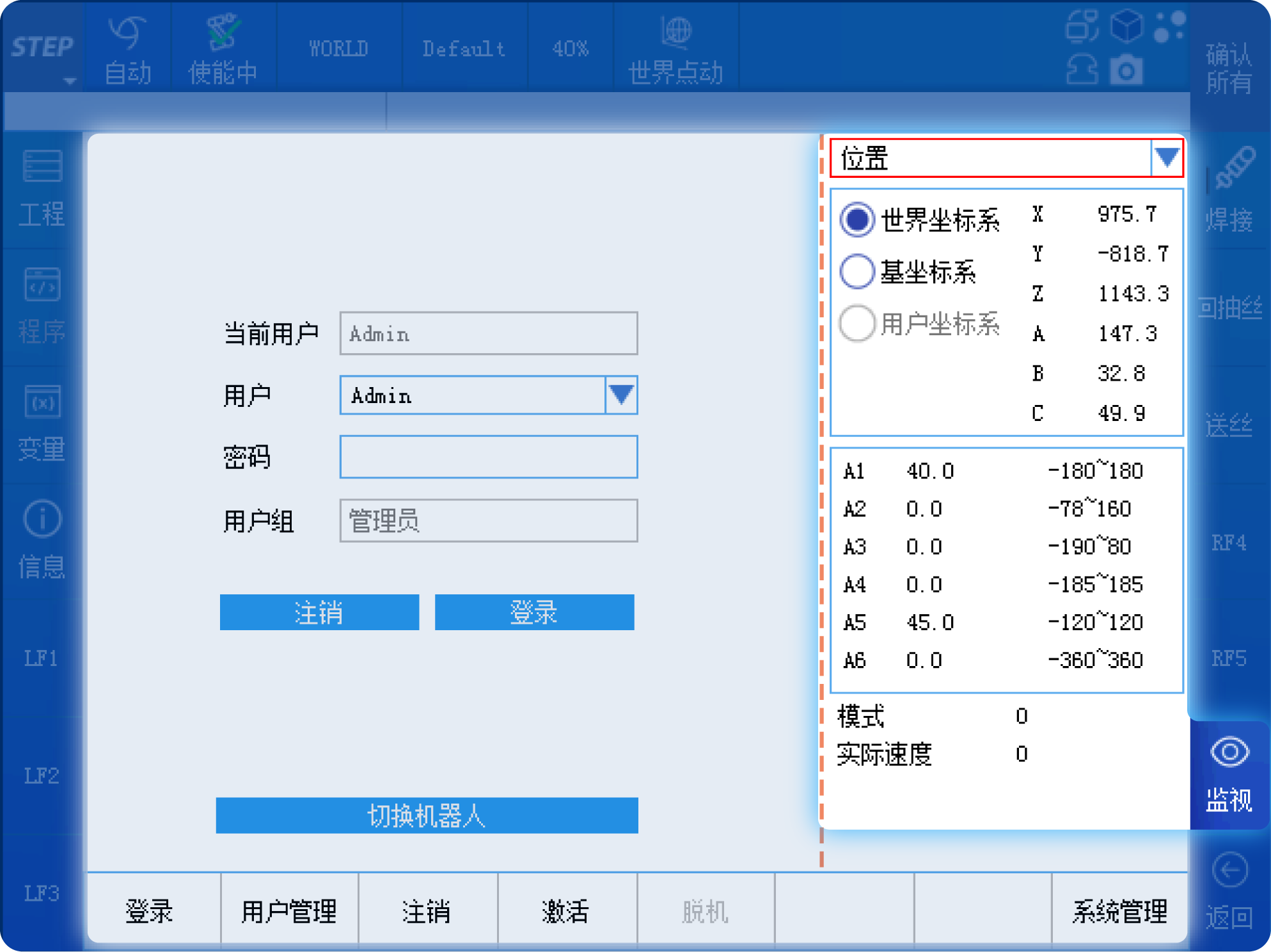
通过下拉框选择“IO”,即可监视DI/DO和AI/AO状态。


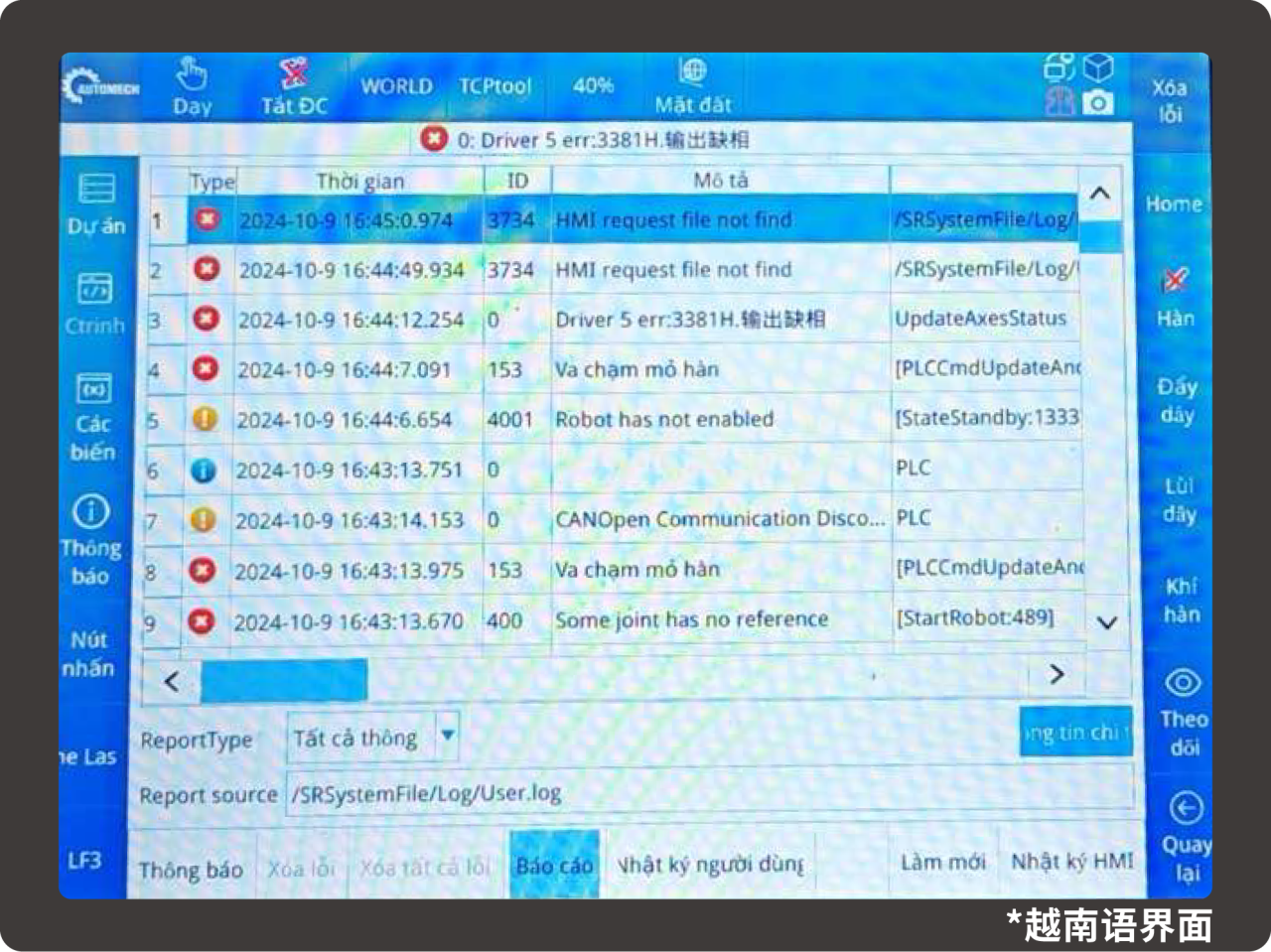
06|语言功能
系统默认支持中文和英文两种语言,同时还支持其它语言定制。通过菜单栏>控制面板>语言调出语言界面,可选择英文、中文、其他三种语言,选择后立即生效。当选择“其他”时,系统显示定制的其它语言。
定制其它语言需要将系统language文件夹里的文件翻译成定制语言,通过HMI替换的方式导入定制语言。同时还需要将指令注释文件、错误描述文件、示教器弹框报错文件、焊接报错文件里的描述内容翻译为定制语言,放入系统指定目录,重启机器人生效。
07|快捷键功能
最后介绍一下左右两侧的快捷键功能,当现场编程需要频繁使用某个功能时,可将该功能绑定快捷键,方便一键操作,提升编程效率。界面左侧有3个快捷键LF1、LF2、LF3,右侧有5个快捷键RF1、RF2、RF3、RF4、RF5。

如焊接工况下,常使用“仿真焊”调试机器人程序,送丝和回抽丝在调试阶段也会频繁使用,就可以把这些功能绑定到快捷键方便一键调用。

新时达机器人示教器主界面的功能和操作
上一页
联系我们

智慧电梯:400-820-7921
变频驱动:400-821-0325
运动控制:400-821-0325
多关节机器人:400-920-0275
SCARA机器人:400-168-2718
邮箱:[email protected]
地址:上海市嘉定区思义路1560号,201802
扫一扫关注新时达
新时达公众号