
 搜索
搜索
-
 基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。 -
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
 集团成员
集团成员
 EN
EN新时达伺服 | 让并联机器人更稳更快更强
发布时间:
2020-10-16 00:00
1.设备介绍
常见的并联机器人如上图所示的四轴机器,具有沿三位空间XYZ轴平动和绕Z轴旋转的功能。其机械结构通过电机连接减速机后直连主臂,主臂通过限位器连接副臂,在定平台上或者动平台上会有第四轴用于绕Z轴旋转。运动时,电机带动主臂在一定角度内上下摆动,带动副臂实现动平台的精准定位动作。

2.方案介绍
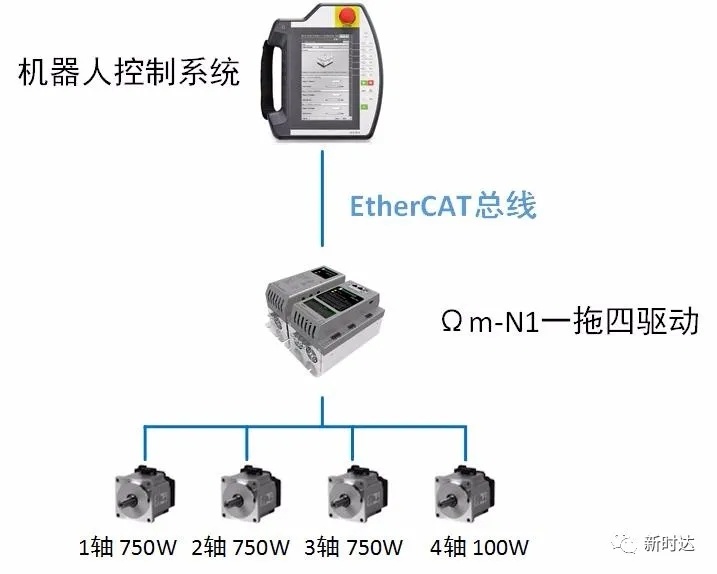
本方案采用的Ωm-N1系列伺服驱动是新时达运控事业部推出的一款多轴产品,系统采用EtherCAT总线通讯。采用直流母线动力架构,支持多驱动单元级连供电三轴一体和四轴一体可以灵活定制,满足不同的应用场景。

3.产品配置
本方案主要配置如上图所示,机器人控制系统通过EtherCAT总线与Ωm-N1驱动连接,驱动下分别带有Delta机器人的1、2、3、4轴。一键刚性调整功能,能够简单快速的完成系统响应性的调试,减少客户的调试时间。通过驱动的3倍过载能力和硬件电流环响应,能够保证在标准的门字型测试动作下节拍达到150次/分。出色的末端振动抑制功能能够有效消除100Hz以下的末端振动,在保证快速响应的同时避免因为末端的抖动影响最终的抓取效果。
4.方案特色
(1)ODM采用标准的402协议,能够配合市面上主流的控制系统,包括Keba的机器人控制系统。
(2)Ωm-N1四轴一体,一拖四的驱动完美匹配并联机器人配置,同步性能高。
(3)体积小到一手掌握,能够为客户节约电柜空间,选择支架安装,更进一步压缩安装空间,保证客户的定制化需求。
(4)借助动态制动功能,避免因为异常指令或动作导致系统不受控飞车发生碰撞。
(5)匹配自识别电机,能够免去客户调试的烦恼,只需一个刚性参数满足客户不同的响应需求,大大缩短了调整整定的时间。
联系我们

智慧电梯:400-820-7921
变频驱动:400-821-0325
运动控制:400-821-0325
多关节机器人:400-920-0275
SCARA机器人:400-168-2718
邮箱:[email protected]
地址:上海市嘉定区思义路1560号,201802
扫一扫关注新时达
新时达公众号